主题一:ORB关键点和BEBLID描述子
融合的视觉里程计研究
主讲:李杰
(导师:李俊)
主题二:单目深度估计
主讲:刘希豪
(导师:李俊)
主题三:双目立体匹配
主讲:刘成
(导师:李俊)
主办机构
广州大学电子与通信工程学院
时间安排
2023年5月9日下午16:00-17:30
地点
腾讯会议ID:302-959-304
为拓宽研究生学术视野,促进研究生学术交流,营造良好的学术氛围,广州大学电子与通信工程学院主办的“研途青年说”第39讲于5月9日下午16:00-17:30在线上(腾讯会议ID:302-959-304)举行。本次主讲人为20级研究生李杰、刘希豪和刘成,主题分别为ORB关键点和BEBLID描述子融合的视觉里程计研究、单目深度估计以及双目立体匹配。
李杰同学汇报的主题是ORB关键点和BEBLID描述子融合的视觉里程计研究,他从研究背景及意义、研究方法及过程、研究结果及分析和研究总结及展望这四部分进行了讲解。李杰同学首先利用几个现实案例介绍了同时定位与地图构建(SLAM)的相关概念,并讲解了视觉SLAM的实现原理。随后,通过流程图展示了其研究方案的具体步骤,重点介绍了研究过程中采用的低光照图像增强方法、ORB关键点和BEBLID描述子融合的特征点检测方案以及状态估计与联合优化方法。最后,根据实验结果表明该方案相对于对比方案在性能方面有显著的提升。

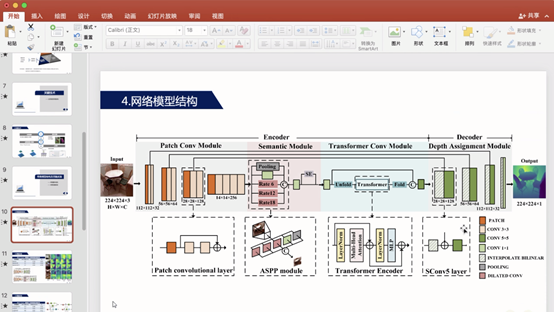
刘希豪同学汇报的主题是单目深度估计,他首先从选题背景和意义出发,介绍了深度估计的实际应用,然后引出研究现状与研究目标,通过软硬件方面的比较,总结出自己的主要研究目标是性价比高的单目深度估计方案。接着,他讲解了研究过程中实现单目深度估计的关键技术,分别是分块卷积、语义分割、全局注意力机制以及上采样,同时还展示了相关的网络模型结构以及消融实验,最后还介绍了网络部署应用后的结果。研究结果表明,所提方案实现了精度与速度之间的出色平衡。
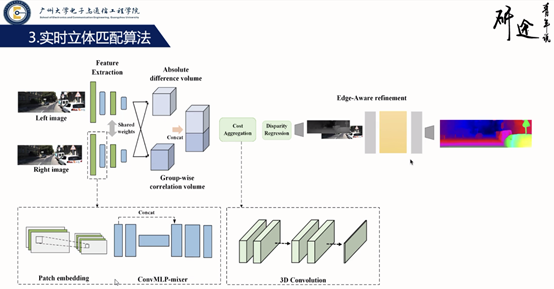
刘成同学汇报的主题是双目立体匹配,他首先介绍了双目立体匹配在计算机视觉领域的意义以及相关的应用,然后提到研究现状,简单地介绍了传统的立体匹配方法和基于深度学习的立体匹配方法,接着讲解了自己研究工作中基于深度学习的实时立体匹配算法。为了解决粗匹配和减少3D卷积层的方法导致视差图中缺少精细细节这个问题,采用了边缘感知细化网络通过细化左侧原始 RGB 图像的残差来恢复高频细节。总的来说,刘成同学提出了CMNet这一轻量级的架构来实时实现立体匹配,最后的研究结果表明,该方案在速度和准确性之间做出了更好的折衷。
研途青年说学生简介

李杰
2020级电子与通信工程学院
新一代电子信息技术专业硕士
导师:李俊
主要研究方向:同时定位与地图构建
主要科研成果:SCI论文一篇

刘希豪
2020级电子与通信工程学院
新一代电子信息技术(含量子技术)专业硕士
导师:李俊
主要研究方向:单目深度估计
主要科研成果:发明专利一篇、发表IEEE期刊一篇

刘成
2020级电子与通信工程学院
电子与通信工程专业硕士
导师:李俊
主要研究方向:立体匹配
主要科研成果:SCI论文一篇

